袁成, 穆作栋. 分布式空中作战概念分析[J]. 航空兵器, 2020, 27(4): 11-16
袁成, 航空工业信息中心高级工程师。 负责国外国防科技创新领域相关研究, 承担军科委、 科工局、 装发部等多项相关课题, 多次获得军方高层领导的重要批示, 发表文章近百篇, 在军方机构、 航空工业集团成员单位和民间智库进行多次演讲, 效果良好。
分布式空中作战概念由DARPA于2014年提出, 是该局着眼大国作战而设计发展的全新空战样式, 旨在将大型、 昂贵、 多功能有人战机的各类功能分解到大量低成本的自主无人机上, 构建由少量高性能有人机和大量自主无人机组成的作战体系, 并通过人工智能辅助开展指挥决策, 能以较低成本实现更高的作战能力, 对敌再次形成压倒性作战优势。 为此, 美军正系统布局关键技术体系, 加速推动概念发展, 值得密切关注。
目前, 美军的战争准备已逐渐从打击恐怖主义调整为大国对抗。 2017年12月18日, 特朗普政府发布了新版《国家安全战略》, 提出美国正面临三大挑战, 其中与势均力敌的大国开展竞争位列榜首, 而打击ISIS等恐怖主义处于末席。 2018年1月19日, 美国国防部公布了新版《美国国防战略》, 其秉承《国家安全战略》指导思想, 认为美军应着眼于大国之间的战略竞争, 而非恐怖主义。
美军认为, 其他军事大国在列装了先进隐身战机、 远程精确制导武器、 高超声速打击武器以及先进电子战和赛博战装备后, 作战能力快速提升, 与美军的差距越来越小。 另外, 美军表示其他军事大国正在通过研读海湾战争、 阿富汗战争、 伊拉克战争等的经验教训, 系统学习美军的作战方式, 并针对美军弱点构建了“反介入/区域拒止”能力, 即通过破链断网、 打击指挥控制中心节点、 攻击大型作战集群、 摧毁军事基地等方式, 使美军难以进入战区, 而即便进入, 也无法有效组织兵力开展联合作战。
除其他军事大国对美国的威胁越来越大, 美国自身的军事发展也有一些亟需解决的难题。 在装备发展方面, F-22、 B-21等高端战机存在研制时间久、 研发经费高、 服役数量有限、 服役时间长、 无法承受战损消耗等难题。 如2020年5月在1架F-22战斗机因故坠机后, 整个F-22机队仅存183架机。 另据美国空军统计, 1990年其战机的平均服役时间为17年, 而2018年该时间已拉长到30年。 在美军目前预算无法实现快速增长的背景下, 未来高端空中作战装备的采购仍然有限, 服役数量不足的问题将一直困扰美军。 在作战概念方面, 美军认为其继续沿用以往的作战思想和兵力设计理念, 将较难实现压倒性优势且容易被其他军事大国针对。 如在网络中心战概念中, 指控和通信的设想过于理想化, 因为在大国对抗时美军不可能畅通无阻地通信并进行指挥控制。 另外集中化的指挥控制也是不可能的, 因为美军的预警机和合成空战中心肯定将成为对手首批打击的重点目标。 在技术引入方面, 美军认为功能越多、 集成化越高、 越复杂的装备引入新技术的难度越大, 而越简单的装备则更容易进行快速更新。 如在美军F-22战斗机的研发周期内, 俄罗斯的一体化防空系统已经从SA-10D发展到S-500, 演化了6代。 目前, 美国在人工智能、 自主系统、 低成本制造等技术方面取得了快速发展, 且位于世界领先水平, 因此如何把这些最先进的技术快速融入作战装备, 实现作战能力快速提升, 成为美军当前重点考虑的问题。 图1所示为F-22战斗机与俄罗斯6代防空系统发展情况。
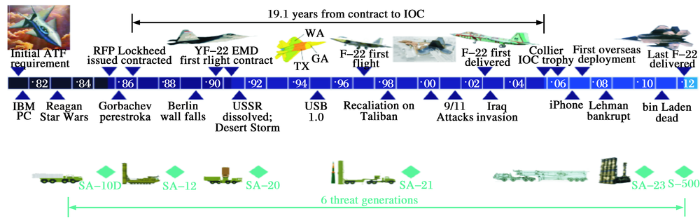
图1 F-22战斗机与俄罗斯6代防空系统发展
Fig.1 The development of F-22 fighter and Russian 6-generation air defense system
为了让集中化的指挥控制节点和军事基地等高价值目标免遭针对性打击, 美军提出了基于“地理空间”的分布式作战概念, 主旨是让部队分布于地理空间的各个位置, 致使对手或对全部目标都打击、 或花时间想清楚美军的作战意图, 从而延缓对手的作战速度。 然而, 分布式的作战样式需要以足够多的装备数量作为基础, 美军基于“地理空间”的分布式作战概念除了会给后勤保障带来巨大的压力外, 还将延缓美军作战节奏, 且数量有限的预警指挥机等高价值目标一旦在空中被发现, 会成为重点打击对象, 较难解决美军空中作战装备数量少、 成本高、 无法形成绝对优势等难题。
将新兴技术和全新作战概念相结合, 一直是美军应对重大挑战的解决途径, 如在冷战后期, DARPA将隐身和精确制导等技术与空地一体化作战概念相结合后, 成功抵消了苏联的地面装甲洪流, 为美军赢得冷战胜利奠定了重要的军事基础。 目前DARPA又在思考应对其他军事大国挑战的解决方案, 成果之一便是通过将人工智能和自主协同等先进技术与基于“功能分解”的分布式空中作战概念相结合, 使美军拥有信息和决策优势, 从而实现对“反介入/区域拒止”能力的抵消。
分布式空中作战概念基于“功能分解”, 它与基于“地理空间”的作战概念不同之处在于, 通过把高性能航空装备的功能下放到低成本自主无人机上, 大幅扩充作战装备的数量, 为真正实现分布式奠定基础。 另外, 还可降低装备发展周期和成本, 实现技术快速引入和迭代升级。 最后通过有人机-无人机网络化的协同, 在实现“功能分解”的同时, 实现基于“地理空间”的分布式作战。
DARPA在2014年4月30日发布的“体系集成技术试验”(SoSITE)项目的跨部局通告(BAA)中提出了该概念。 该BAA表示, SoSITE项目打算研究包含不同类型飞机、 武器、 传感器和任务系统的创新体系架构, 并希望将各种空战能力分布到大量可互操作的有人和无人空中平台上。
2016年2月24日, 时任DARPA局长的普拉帕卡尔博士在美国参议院做的“2017财年美国国防领域科技项目”证词中, 提及了分布式空中作战概念。 他表示, DARPA最近几年启动了一系列项目, 目的都是要通过技术研发和验证, 将不同的能力分布至不同的低成本空中平台。 达到这种设想的关键是将全新能力集成至现有系统中, 相比传统多功能空战平台可实现更快和更廉价的发展。
根据SoSITE项目公布的概念图(见图2), 可大致勾勒出分布式空中作战概念构想。 需要说明的是, 构想与实际发展情况势必有较大出入, 但在一定程度上可反映出分布式空中作战概念的愿景和努力方向。

图2 SoSITE项目概念图
Fig.2 Concept map of SoSITE program
从图中可看出, 根据与敌人距离的远近程度, 分布式空中作战平台从纵向看可分为三个层次。 最远的一层由E-3和E-2系列空中预警指挥机构成, 说明未来空、 海军都可具备遂行分布式空中作战的能力。 两型平台通过专用数据链连接(绿线), 也可通过LINK-16等通用数据链(蓝圈)与五代机连接, 针对整个分布式空中作战任务开展指挥控制和作战管理。 中间一层由F-22和F-35战斗机构成, 拥有打击、 情监侦、 电子战和通信等功能, 可与前方的各类无人机组成自主的有人机-无人机编队, 指挥控制无人机遂行任务。 最近一层由三型无人机构成, 即对空作战无人机、 电子攻击无人机和察打一体无人机。 如果说F-22和F-35是猎人, 那么各型无人机就是猎犬, 在战场一线承担大量作战任务。
另外, 根据要摧毁的敌方目标性质, 分布式空中作战平台又可分为空空作战和空地作战两个序列。 在空空作战方面, 具备强大空中优势的F-22指挥控制两架无人机打击敌人的苏-27系列战斗机, 与导弹相平行的蓝线可解读为火力打击之意。 在空地作战方面, F-35指挥控制两型飞翼式布局的无人机。 前端的一型两架无人机为多用途分布式平台, 可针对敌一体化防空系统的雷达开展分布式电子攻击(白线)。 后端的一型两架无人机可能是察打一体无人机, 可执行分布式目标确认任务, 而无人机与敌防空导弹发射车之间的蓝线, 也暴露了该机型所拥有的打击功能。 另外, 在空空作战和空地作战序列之间有一架与察打一体无人机同外形的无人机, 承担两个序列间的通信中继任务, 可使分布式空中作战的各平台拥有统一的战场图像, 增强整个作战体系的态势感知能力。 另外, F-35自身也可投放类似“小直径炸弹”的空地武器, 说明其可根据实际情况, 既可在后端指挥控制无人机, 又可在前端与无人机联合执行任务。
如上所述, DARPA仅在一些项目和证词中提及了分布式空中作战概念, 并未形成官方正式发布的概念文件。 而在2017年, DARPA正式提出了“马赛克战”概念, 并迅速成为美国国防领域讨论热点。 2019年, 美国空军协会米切尔航空航天研究所发表了《马赛克战: 重塑美军竞争力》的研究报告。 2020年, 美国战略和预算评估中心(CSBA)发布了《马赛克战: 探索人工智能和自主系统执行决策中心战》报告。 从多方面的信息可以判断, “马赛克战”概念与分布式作战概念一脉相承, 可以认为是后者的深化发展版本。 在时间上, 2017年后未见DARPA再公开提及分布式空中作战概念, 一直以“马赛克战”概念统一口径。 在内涵上, “马赛克战”概念旨在借鉴马赛克画简单、 可快速拼接等特点, 实现大量低成本、 功能相对单一系统的动态组合与密切协作, 形成敏捷集成、 极具弹性的作战体系。 这与分布式空中作战概念的内涵相似, 只是并未单独提及空中作战域。 在研究项目上, 从上述两份智库报告可知, 现支撑“马赛克战”概念的项目, 如SoSITE等, 与之前支撑分布式空中作战概念的项目一致。 另外上述两份报告在阐述“马赛克战”作战概念时主要以空中作战进行说明, 表明“马赛克战”作战概念将继承分布式空中作战概念的基础, 并从空中作战域形成突破口, 未来将逐步扩展到各作战域。 鉴于此, 在下文阐述分布式空中作战的特点、 作战优势等方面的内容时, 也引用了“马赛克战”概念的相关理念。
按照美国空军《小型无人机系统飞行规划2016-2036》给出的定义和相关描述, 无人机蜂群是指在操控人员(空中或地面)的指挥或监督下, 参照自然界蜂群、 蚁群等的集体行为方式, 以自主组网方式遂行统一作战任务的一组小型无人机集群。 其中, 构成蜂群的无人机既可以相同(同构)也可以不同(异构), 组群方式可以是主从型的或无中心的。 无人机蜂群作战是一种“机器对机器协同”的作战方式, 人类指挥官可以针对蜂群整体下指令, 而不用具体控制蜂群中的每一架无人机。 而无人僚机作战是一种“人对机器协同”的作战概念, 有人长机可控制多架无人僚机, 但僚机之间的协同较少。 有人长机与无人僚机通过高度的信息共享、 任务综合和资源优化, 实施协调一致的行动, 进而共同达成作战目的。 从上述构想图和两份智库报告可看出, 无人机蜂群和无人僚机都可以成为分布式空中作战概念中的重要航空装备, 与有人机配合执行高度网络化的协同空中作战。 虽然构想图中未体现出无人机蜂群, 但执行电子战、 目标确认甚至打击任务的一架无人机都可由若干架蜂群无人机替代。 另外, 在SoSITE项目发布的构想视频中, 也出现了无人机蜂群, 其与F-35战斗机协同作战, 共同打击了敌人的一体化防空系统。
规模性。 DARPA分布式空中作战概念强调用大量低成本平台分解F-35等高性能平台的功能, 这将极大扩充美军空中作战装备规模, 为实施分布式空中作战概念奠定基础。 未来空中战场, 少量高端有人机将为美军带来质量优势, 而大量无人机为美军带来数量优势, 并通过有人机-无人机协同实现颠覆性作战能力。
强韧性。 强韧性是指针对出现的状况(自身故障、 环境变化、 对手打击等), 仍然能够维持现有功能不变或者只有小幅降级的能力。 分布式空中作战概念的强韧性主要体现在: 一是大量低成本无人机可实现功能备份, 并允许消耗, 部分无人机战损并不影响整体作战能力; 二是协同网络强调强韧性, 如通过发展多种数据链、 多种类型的波形、 多种类型的标准等抵抗赛博和电子攻击。
敏捷性。 美国空军《未来作战概念》文件中描述, 作战敏捷性是指针对特定的问题, 快速制定多种解决方案, 并选择最佳方案快速执行的能力。 分布式空中作战概念可根据战场实时态势, 通过人工智能辅助, 快速制定作战方案, 并根据战损情况实时对各无人机装备进行最优的排列组合, 另外还可以对新的作战需求实现快速响应, 通过开放式架构和接口快速引入全新的技术和能力。
经济可承受性。 分布式空中作战拥有大量无人机, 其尺寸相对较小、 采用可消耗设计, 因此成本很低。 美国战略和预算评估中心认为, 大量低成本无人机可有效破解美军空中作战装备能力越高, 成本就越高的难题。
复杂性。 分布式空中作战可通过复杂性极大加强战争迷雾, 让对手难以捉摸。 一是部署位置未知, 无人机可通过运输机或轰炸机在空中任意地点投放, 或以标准集装箱等方式秘密部署在相关地点, 而不被对手发现。 二是部署数量未知, 低成本无人机平时存放在空中发射载机或集装箱等内部, 让对手难以评估装备数量。 三是作战方案未知, 作战时分布式空中作战装备将大面积出现在对手面前, 让其难以区分主动点和佯攻点, 摸不清美军作战意图。 目前空中作战主要凭借隐身和精确打击等取胜, 预计在未来复杂性也可成为制胜机理的重要组成部分。
难以模仿性。 美军一直表示, 对手正通过各种方法学习其先进技术, 但分布式空中作战却相对较难模仿。 一是无人机的气动外形虽然较好仿制, 但为分布式空中作战赋能的却是自主协同作战软件算法, 较难测仿。 且软件算法随时能升级, 可较隐秘地提升整个体系能力。 二是有人机-无人机协同的战术战法较难模仿, 相比于单一的战斗机平台, 分布式空中作战将更多利用人工智能辅助制定空战战术战法, 产生很多让对手出乎意料的战术, 也让对手更难以学习和模仿。
虚拟性。 分布式空中作战在发展过程中将更多地用到数学孪生等虚拟技术, 来降低设计和制造的周期与成本, 也可以用来探索有人机和无人机复杂的指挥控制通信关系。 另外, 为验证这种新型作战概念的可行性和作战能力, 将更多地在模拟仿真环境中进行推演, 不断对作战概念进行优化, 降低概念发展和验证的成本。
渗透性。 美军快速发展分布式空中作战概念, 也在加速列装F-35战斗机, 并探索“数字化百系列”未来高端有人战机。 DARPA强调, 分布式空中作战概念并不打算直接替换现有作战机型, 因为与F-35战斗机或B-21远程轰炸机不同, 分布式空中作战在运用时容易直接引发大规模战争, 战略威慑能力有限, 因此无人机的列装和有人机的针对性改装将会循序渐进地进行, 逐步渗透进美国空中作战装备体系中, 未来可能会以试点部队的形式出现, 成熟后将会不断扩大部队规模。
适应性。 DARPA特别强调分布式空中作战概念的适应性, 一是可以基于现有航空装备实现, 不需要新研全新的装备, 而未来新型航空装备可以融入分布式空中作战体系中, 实现体系中装备类型和规模的扩展。 二是既可以用于强对抗环境, 也可以用于弱对抗环境。 虽然分布式空中作战概念主要针对军事大国设计, 但也可以通过调整体系中装备规模, 有人机、 无人机比例等用于与中等国家或非政府组织作战, 以适应各种作战威胁。
DARPA认为分布式空中作战可让传统的OODA杀伤链变为OODA杀伤网。 第二次世界大战期间的OODA循环是按顺序分别进行的, 侦察飞机拍摄航空图像, 带回基地进行分析, 经过决策派遣轰炸机和战斗机进行攻击。 之后OODA循环开始向空中作战平台集成, 一架或数架飞机便可完成OODA循环中的大部分功能。 而目前美军正在发展的多域作战, OODA循环中的各步骤可来自各作战域, 打通了各作战域联合作战的通道, 但所依赖的还是目前传统的作战装备。 而分布式空中作战能通过有人机与大量低成本无人机的协同, 实现OODA杀伤网, 空战装备可更加灵活和便捷地组合, 如一架观察平台可以是杀伤网中多条杀伤链的组成部分, 或多架观察平台可一起为一条杀伤链提供信息。 平台的角色也可变化, 如可从观察平台变为自杀式攻击平台。 决策平台将更加深入战场前线, 而不是游弋于防区外, 以实现更快的决策制定, 针对同一目标生成多条杀伤路径, 加快作战进程。
DARPA认为, 实现OODA杀伤网, 将为美军带来决策优势, 让自身更好地制定决策, 同时为对手正确快速地制定决策带来困难, 即实现所谓的“决策中心战”。 当拥有决策优势后, 将为对手的作战带来多重困境, 不知道美军的意图, 也不知道如何调兵遣将, 做任何决策都有风险, 一交战便会被美军瞬间击溃。
指挥控制。 分布式空中作战包含大量多型有人和无人航空装备, 面对战场环境、 敌情和可用装备的快速变化, 如何快速高效开展指挥控制、 制定合理的战术决策是需要解决的关键问题。 美军认为这需要采取人+机器的指挥控制方式。 人类指挥官接收战役等级的信息输入, 开展作战规划和下达作战命令。 机器根据人类指挥官提供的指令, 不停开展计算以确定己方可以使用的作战装备、 如何组合可用装备、 使用何种战术战法、 如何为敌人制造多重困境等, 并与人类指挥官不断进行沟通交互。
后勤保障。 分布式的作战样式始终存在后勤保障问题, DARPA的分布式空中作战概念无人机数量和类型较多, 将为后勤保障带来更大压力。 为此, 美军认为可以采用可消耗无人机设计、 分布式库存、 增材制造、 预测性补给和及时补给等技术和途径缓解后勤保障压力。
中小型无人机耐久性。 受自身尺寸限制, 中小型无人机携带的燃油有限, 再加上中小型涡轮发动机的耗油率普遍高于大型涡轮发动机, 进一步限制了其耐久性。 为此, 美军认为可以采用空中发射回收以及空中自主加油等方式, 扩展中小型无人机的耐久性。
人工智能。 人工智能是分布式空中作战的重要赋能技术, 但目前人工智能虽已在很多领域产生重大影响, 但却不能向人类解释其“思考”的逻辑, 因此人工智能在瞬息万变和生死攸关的战场是否可被人类信任, 是当前军事领域人工智能发展的掣肘。 DARPA正在引领发展可解释的人工智能, 力求攻克上述难题。 另外, 美军认为在分布式空中作战的最初阶段, 人工智能仅能提供决策辅助, 随着技术的愈加先进, 才会拥有更多的决策权。
试验鉴定。 如何对人工智能和无人机蜂群等开展试验是美军试验鉴定领域面临的重点问题。 人工智能的算法规模巨大和不确定黑箱推理模型, 造成由其制定的决策和行为结果难以预测。 目前美军航空领域的试验鉴定主要针对单一平台进行, 尚不具备对数十或数百架自主协同的无人机蜂群的试验鉴定能力。 因此, 美军正在开展专门研究, 为分布式空中作战的快速发展奠定基础。
针对上述问题, DARPA启动了大量研究项目, 涉及的技术方向包括体系架构、 作战管理、 杀伤网、 无人机平台等, 典型项目的投资额度已达10亿美元量级, 且大多处于关键技术的飞行演示验证阶段, 有些项目已完成向军种的技术转化。
SoSITE项目。 2014年启动, AFRL后参与其中, 旨在基于现有技术水平, 把传统战机功能分解至可互操作的有/无人机, 并即插即用各种机载系统和武器。 2018年7月, 项目在对抗空域开展飞行试验, 验证了名为“缝合”的全新体系集成技术, 实现了地面站、 半物理飞行试验系统、 C-12运输机和试验飞机之间的互操作能力。
“分布式作战管理”(DBM)项目, 其概念图如图3所示。 2014年启动, AFRL后参与其中, 旨在发展先进算法和软件, 提高态势感知和任务自适应规划等能力, 帮助履行战场管理任务飞行员进行快速且合理的决策, 在强对抗环境中更好地执行分布式空中作战任务。 2017年9月, DARPA和AFRL进行了首轮飞行试验, “利尔喷气”公务机扮演无人机, 有人机为地面驾驶的虚拟机, 验证了通信中断后任务还可按预期继续执行的能力。 2018年3月, DARPA向BAE系统公司授出最终阶段合同。

图3 “分布式作战管理”项目概念图
Fig.3 Concept map of DBM program
“对抗环境强韧同步规划和评估”(RSPACE)项目。 2015年启动, 旨在开发以人为中心的软件辅助决策工具, 帮助空战人员在复杂环境更好控制作战行动。 2019年3月, DARPA授予BAE系统公司价值310万美元的最终阶段合同。 该公司在项目中研发了“分布式协同指挥控制工具”自主软件, 可提高空中作战的感知能力, 评估作战前、 中、 后的空战计划和任务风险, 分析作战效果。 项目于2019年8月在美空军基地进行了为期一周的演示验证。
“空战进化”(ACE)项目, 其概念图如图4所示。 2019年启动, 旨在研究人-机协同空战, 并首先将在最激烈的空中格斗条件下进行试验, 提高人类对自主空战系统的信任。 DARPA在项目授出第一阶段合同之前, 率先启动了“阿尔法空中格斗”竞赛, 以招揽人工智能开发人员, 发展格斗算法, 为其顺利实施项目打好基础。 2019年10月, DARPA选定了参加竞赛的8支团队。 2020年4月, DARPA表示“阿尔法空中格斗”的决赛活动受新冠疫情影响已被推迟至2020年8月17日至20日进行, 试验地点为内华达州拉斯维加斯的AFWERX空军创新中心。 2020年5月, 美国代内提克斯公司赢得项目第一阶段“技术领域3”(TA3)合同, 价值1 230万美元。

图4 “空战进化”项目概念图
Fig.4 Concept map of ACE program
“拒止环境协同作战”(CODE)项目。 2015年启动, 旨在通过发展先进算法和软件, 探索分布式空战无人机的自主和协同技术, 使无人机群可在一名操作人员的管理下协作完成发现、 跟踪、 识别和攻击目标等任务。 2018年11月, 6架真实的无人机和24架虚拟的无人机在“真实-虚拟-构建”(LVC)环境中开展了地面和飞行试验, 验证了无人机蜂群在强对抗环境中针对非预期威胁的适应能力。 无人机蜂群可有效分享信息、 协作规划和分配任务, 制定协调的战术决策, 并在最小通信情况下共同响应动态、 高威胁环境。 2019年春, 项目已全部转化至美国海军航空系统司令部。
“飞行导弹挂架”(FMR)项目, 其概念图如图5所示。 由DARPA在2017年公布, 旨在研究高度简化、 飞行和作战功能有限、 可快速批产的低成本无人机平台, 既可作为F-15等第三代战斗机的普通挂架, 发射各类武器弹药; 也可成为无人僚机, 发射后飞行至目标空域, 执行巡逻飞行和武器发射等任务。 但目前未见有关项目进展的后续报道。

图5 “飞行导弹挂架”概念图
Fig.5 Concept map of FMR program
“小精灵”项目。 2015年启动, 美国空军情报监视侦察部门也参与其中, 目标是研发低成本无人机蜂群平台、 空中投放回收、 高速数字式飞行控制等技术。 2018年4月, 美国代内提克斯公司获得最终阶段合同, 其无人机类似于巡航导弹构型, 而空中投放回收装置与目前成熟的空中加油系统相仿。 无人机长4.27 m、 宽0.6 m、 高0.53 m、 翼展3.73 m、 总重680 kg、 最大载重65 kg、 载荷功率1 200 W、 最大巡航马赫数大于0.6、 最大空中投放高度12 200 m、 最大空中回收高度6 000 m、 作战半径/作战半径处的巡逻时间46 km/4 h或555 km/大于1 h、 空中回收速度7 min/架、 回收后再次出动时间小于24 h。 2019年11月, “小精灵”无人机成功开展首飞, 持续飞行了1小时41分钟, 演示了无人机空中发射、 机翼展开、 发动机冷起动、 稳定飞行、 展开回收用对接臂等过程。 DARPA计划在2020年中期使用C-130运输机开展多架无人机的空中投放回收验证, 回收速率为每30分钟4架。 图6所示为“小精灵”无人机飞行试验图。

图6 “小精灵”无人机飞行试验图
Fig.6 ‘Gremlins’ UAV during a flight test
协奏曲项目。 2016年启动, 旨在发展能在通信、 雷达和电子战之间自适应和灵活切换的射频原型系统, 可配装至小型平台。 2016年5月公布的跨布局通告表示, 该项目第一阶段将孵化各项技术和创造架构, 持续15个月; 第二和第三阶段将开展设计、 制造和试验, 持续33个月。 2019年8月, 美国Perspecta实验室获得项目第二阶段和第三阶段合同, 将继续构建其射频资源管理解决方案, 证明该概念的可扩展性、 灵活性和适用性, 并开发专门的无人机有效载荷。
DARPA分布式空中作战概念将对美军产生全方位影响。 分布式空中作战通过高度网络化的有人机-无人机协同, 带来的不仅是全新的作战概念和相应的支撑装备, 如果最终落地将会给美军带来全方位的变革。 例如, 装备采办管理方面, 要针对有限使用寿命的无人机和人工智能软件等制定相应的采办管理办法, 设计全新的项目管理阶段和里程碑节点。 技术研发方面, 体系架构设计、 开放式系统接口、 智能指挥控制、 自主飞行控制、 低成本机体平台、 低成本航空发动机、 小尺寸低功耗机载传感器、 小型航空弹药等技术将得到快速发展, 另外先进民用技术参与的进程也会加快。 条令条例方面, 针对无人机自主作战和有人机-无人机协同作战制定全新的单装使用条令, 体系作战条令和相应的战术战法, 并通过模拟仿真和实机演练不断成熟演进。 后勤维护方面, 分布式维护和可消耗平台设计等将为后勤维护带来全新的挑战, 这将极大改变美军未来的后勤维护方式。
分布式空中作战针对对手是否可以实现压倒性优势仍存疑问。 一是其自身发展的不确定性较强, 能否实现如此复杂的有人机-无人机协同作战仍属未知, 另外人工智能是否实现可解释, 进而赢得人类信任, 也存在较强的不确定性。 二是对手可以继续发展“反介入/区域拒止”能力, 打击美军的军事基地, 打击空母舰和预警机等高价值有人装备, 击毁有人隐身战机, 让各种无人机失去指挥控制依托, 直接瓦解分布式空中作战体系。 三是对手可以发展针对性的对抗手段, 通过电子战和赛博战打击分布式空中作战高度依赖的协同网络, 如可以装备大量电磁脉冲自主作战巡航弹, 直接飞入美军分布式空中作战体系, 实现破链断网。
要牢牢把握未来有人机-无人机协同作战的发展趋势。 无人机是当今航空领域发展热点, 世界各国都有大量研发项目, 因此可以预期, 无论是否可以实现分布式空中作战, 有人机-无人机协同必将成为未来重要的发展方向。 因此首先要高度重视无人机装备的预研和研制, 并将其定位在未来航空主战装备的位置, 通过合理制定发展规划和路线图, 牵引无人机又好又快发展。 其次在有人机-无人机协同作战装备发展过程中, 设计好各装备间的指挥控制关系和战术战法等内容, 并通过模拟仿真和实机验证等方式不断成熟演进, 实现装备的战技结合, 使装备一服役就可具备强大的协同作战能力。 最后装备设计人员除了精通航空专业技术知识外, 还需懂得作战方面的知识, 以便真正设计出满足有人机-无人机协同作战需求的航空装备。

工业4.0创新平台 版权所有 All Rights Reserved, Copyright© 2013- 京ICP备14017844号-3

评论