近期数字孪生体联盟联合中国系统工程学会等主办了第三期“系统工程沙龙”,邀请瑞典皇家理工大学博士,TUV认证的ISO 26262功能安全工程师张新海做了《系统性分析自动驾驶中的关键场景》的分享,介绍了在ISO 26262安全体系中引入SOTIF方法论。
该分享引起了数字孪生体联盟部分成员的热议,如何在数字孪生汽车体系中遵循相关标准,成为了行业创新发展的一种障碍。数字孪生汽车作为新兴概念,如何跟ISO 26262融合,张新海博士给出了一个解决方案。
针对ISO 26262安全体系以及数字孪生汽车相关进展,本文做一个简要介绍。

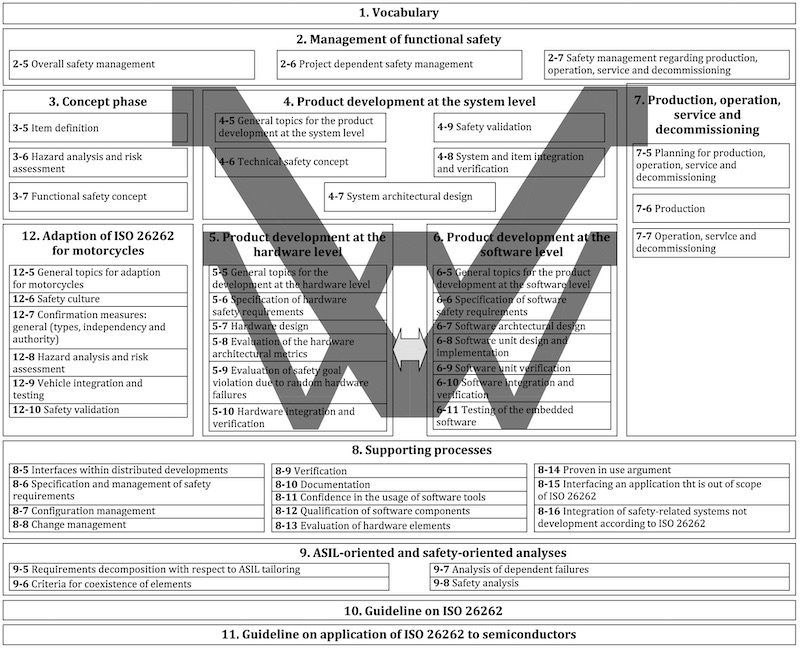
ISO 26262《道路车辆功能安全》针对总重不超过3.5吨八座乘用车,以安全相关电子电气系统的特点所制定的功能安全标准,基于IEC 61508《安全相关电气/电子/可编程电子系统功能安全》制定,在2011年11月15日正式发布。
这是第一个适用于大批量量产产品的功能安全(Functional Safety)标准。特别需要注意的是,ISO 26262仅针对安全相关电子电气系统,包含电机、电子与软件零件,不应用于非电子电气系统(如机械、液压等)。
由于大量人工智能等新一代数字技术的引入,仅仅依靠固化的ISO 26262不能适应新的需要,毕竟它是2005年开始制定,2011年确定的标准,在过于10年期间,相关技术发展非常迅速,特别是数字孪生体技术的引入,需要引入新的体系。
工业4.0研究院称之为“数字孪生汽车”(Digital Twin Car),沿袭“数字孪生+”的特征,数字孪生汽车也具有开放体系,那么它的安全自然是一个难题,不能用ISO 26262体系来描述和判定,应制定新的汽车安全体系。
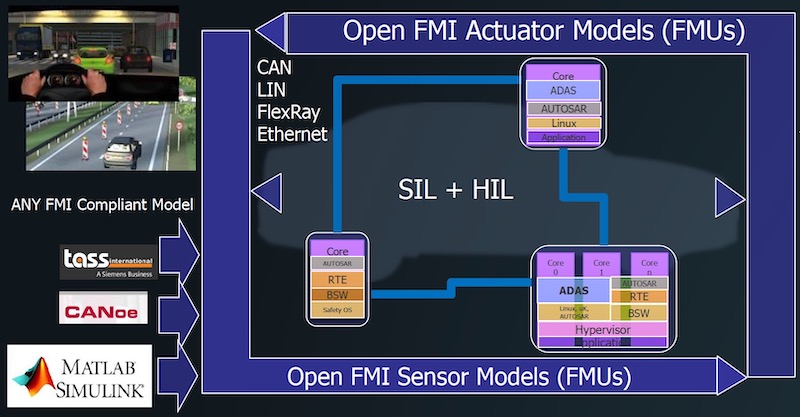
从全球正在探索数字孪生汽车安全体系的组织和企业来看,主要有NIST、工业4.0研究院、翼络数字和西门子等,它们构建了一套数字孪生测试验证方法,适应智能驾驶和自动驾驶等趋势需要。
相关报道介绍,ISO 26262主要由驾驶汽车和火车的相关人员发起,并非电子行业人士、OEM和Tier 1人员,所以对电子设备的安全标准并不清楚,只是在2018年修订的时候,增加了半导体等要求,还针对基于模型的开发、软件安全及失效分析等添加了指导纲要。
即便如此,数字孪生汽车完整体系的引入,超出了ISO 26262安全标准所能够承载的内容。
正如第三期系统工程沙龙分享嘉宾张新海所讲,ISO 26262标准不适应智能汽车和自动驾驶的需要。工业4.0研究院院长胡权表示,数字孪生汽车必须建立新的安全标准,毕竟不少内容可以通过数字孪生汽车自身来验证。
*张新海博士分享链接(视频):
https://www.bilibili.com/video/BV1mL411g7Kv/

工业4.0创新平台 版权所有 All Rights Reserved, Copyright© 2013- 京ICP备14017844号-3

评论