导读:为了深入理解数字工程,工业4.0研究院围绕“数字空军”,开展多方位的梳理分析,计划撰写100篇文章,发布在“数字孪生战场”公众号。本文是第16篇文章,介绍洛马公司正在推进的ABMS作战新模式。
数字孪生战场实验室跟踪了解,洛克希德·马丁公司臭鼬工厂近期发布了灵活的自治计划,内部称为“卡雷拉项目”。这是一个全面的多层、分布式载人无人团队概念的未来作战模式,它对美国空军实现“数字空军”具有重要意义。
卡雷拉项目是一个以人为中心的灵活自治框架的计划,它将集中在一套人工智能驱动的基于软件的控制系统上,该系统将使各级无人驾驶飞机能够以不同程度的自主性运行,并与有机组人员的同行协作,这正是美军目前正在力推的JADC2所需要的效果。
洛马臭鼬工厂负责人约翰.克拉克透露,这是一项多年投资,该公司计划将 1 亿美元自有资金投入无人机、人工智能、升级 F-35战斗机,以便把战场所有元素连接在一起。
卡雷拉在西班牙语中是“种族”的意思,意在强调臭鼬工厂希望在这项工作中取得进展的速度,该工作可以追溯到2007年相关工作,但据称该名称受到保时捷及其著名的卡雷拉系列的影响,包括标志性模型 911 的各种迭代。
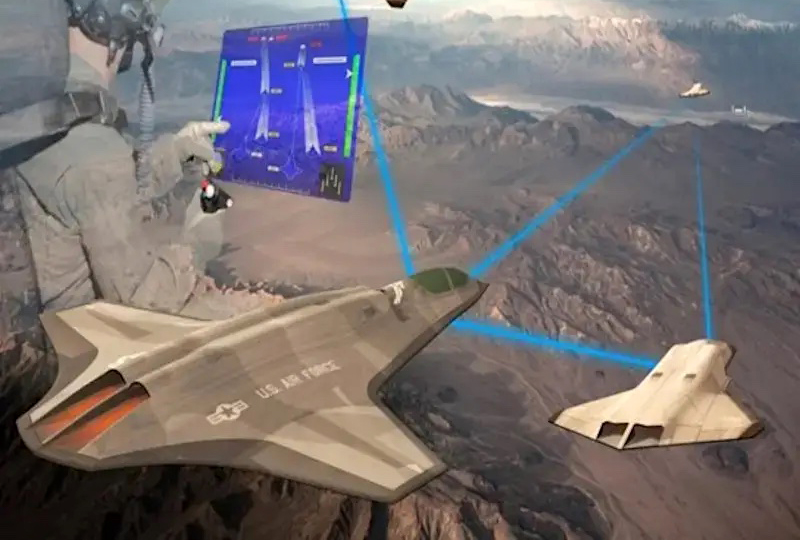
臭鼬工厂展望了基于F-35战斗机的未来作战场景。
在大约10年后的战场上,一架 C-130 放下一个装有小型消耗性无人机的货盘,这些无人机立即飞向F-35 编队。当 F-35 飞行员飞向敌方地对空导弹基地时,他们向他们控制的无人机发出命令:“收集数据”、“前进并引火”或“找到这个目标”。
根据一些无人机收集的数据,飞行员会收到可能的威胁警报,并使用来自前方侦察的其他无人机的信息建议替代路线。
臭鼬工厂将很快开始对这些概念进行初步飞行测试,第一个实验将涉及其速跑者无人机与隐形 F-35 联合攻击战斗机的变体配对的示例。速跑者是一种实验性的低成本“探路者”设计,最初是为了展示新的数字工程和先进的制造技术而开发的,它具有模块化架构,可以相对轻松地针对不同的任务集进行重新配置。
“整个想法是,不是让人类适应所构建的软件系统,而是让软件系统适应人类,”克拉克解释说,“每个人都喜欢以不同的方式与系统交互。”
克拉克谈到了一位经验丰富的战斗机飞行员,他知道如何在多机飞行中操作,甚至领导这样一个特遣队,如何立即对如何与一个或多个无人系统一起工作而不是新手有不同的理解飞行员。因此,未来的无人机如何与传统飞机协同工作,需要灵活地考虑这一点和许多其他人为因素。
“我们真正关注的是一个系统的构建,我们可以评估人类和无人系统的交互,并了解这些程序如何随着时间的推移而建立,这样我们就可以构建一个可以轻松适应的系统......灵活的自治框架,”臭鼬工厂负责人说。他补充说,目前的计划涉及一系列阶段,这些阶段将“系统地使用底层技术”并帮助“探索我们如何将所有这些东西放在一起”。
他接着指出,初始阶段将主要集中在为自主无人驾驶飞机定义核心所需的“行为”。随后的阶段将探索具有这些自主能力的无人系统如何在单个任务过程中实际执行整个“杀伤链”,包括与载人平台合作时。在那之后,重点可能会转移到如何将所有这些插入到一个更大的“杀戮网络”中,涉及更广泛的资产,包括天基系统。
7 月,克拉克透露,臭鼬工作至少探索了使用低地球轨道卫星作为地下载人飞机的无人队友的新想法。
克拉克强调,卡雷拉项目将强调模块化和开放架构系统,无论是在硬件和软件方面,还是利用人工智能 和机器学习的进步。目标是从一开始就融入扩展功能的能力,并在未来添加全新的功能。
臭鼬工厂的负责人描述了已经在现有系统之上“分层”人工智能驱动能力的工作。
“例如,路线规划。我们的车辆具有强大的路线规划能力,”克拉克解释道,“然而,我们现在正在探索如何让人工智能更好地告知如何对实时发生的事件做出动态响应,并将其作为一种机制来推动路线或路线的转变。传感器的使用,这样我们就可以更有效地应用正在部署的系统。”
“我们不能让人类操作员不知所措地试图从这些无人系统中驱动”所需的行为,”他继续说,“另一方面,我们不能让这些系统发生故障并执行操作员不信任它们实际执行的操作。”
洛马公司作为Skyborg 计划的一部分已经向美国空军提供的系统,其中一些系统在测试期间已在XQ-58 无人机内部飞行,这些系统将用于卡雷拉项目。Skyborg 是一个多方面的项目,专注于开发人工智能驱动的“计算机大脑”和相关系统,可用于操作各种类型的无人平台。
7 月,克拉克还提到了过去与总体分布式载人-无人编队概念相关的测试,该概念涉及使用改进的 F-16,提到了 X-62A可变稳定性飞行模拟器测试飞机VISTA。去年,美国空军宣布对以前设计的 NF-16D 飞机 VISTA 进行改装,以便更好地支持 Skyborg 计划和其他先进的无人驾驶飞机项目。
相关资料显示,洛马公司总共花费或以其他方式分配了至少 1 亿美元的内部总投资,主要分配到三个领域:
2000 万美元用于升级 F-35 和开发无人资产;
4200 万美元用于“团队推动者”,包括 AI 开发、联网塔、5G 等高级波形和开放式架构技术;
3800 万美元用于“战场空间倍增器”,这是一笔有趣的资金,其中包括将在战斗机和无人机之间提供超视距通信的低地球轨道卫星,以及可能包括“穿透”的“前向生存平台”传感器”。
臭鼬工厂认为其灵活的自主框架是将大部分(如果不是全部)结合在一起的粘合剂,并且在许多方面比任何特定的无人驾驶飞机设计更重要。这一点跟数字孪生战场实验室的看法类似,构建一套数字孪生战场基础设施至关重要。
“我要强调,正如我之前所说的,你们中的许多人都听说过,这不是‘忠诚僚机’的概念,这不仅仅是让飞机跟随,你知道,F-35 就像小狗一样”,还有“没有合作,”克拉克强调说,“我们真的在努力专注于如何深入了解我们如何围绕人类进行协作的那些较低层次的细节。”
考虑到这一点,克拉克解释说,非机组人员应该是对机组人员的补充,而不是补充。他给出的具体例子是一组高度自主的无人驾驶飞机探测甚至可能混淆敌方防空系统,并将有关这些威胁的信息传递给他们的机组人员。速跑者目前被认为是一个足够便宜且可扩展的平台,而且目前还没有设计用于回收。
灵活的自主框架最终会扩展到其他无人机设计,可能包括更昂贵和更精致的类型。
早在 7 月,洛克希德·马丁公司也曾讨论过这一问题,当时洛克希德·马丁公司推出了四种不同的无人驾驶飞机设计,以配合其团队概念公告。速跑者是其中一种设计的基础,目前称为通用多用途卡车(CMMT)。
“如果您尝试将车辆立即放在 F-35 周围,并期望它“看到”比 F 35 可以“看到”的更远,这意味着它的传感器比 F- 35 更好,”他解释说,并补充说同样的一般逻辑同样适用于其他子系统,例如数据链和武器。反过来,这“意味着它不是一种非常便宜的车辆,然后它开始引发[问题]'为什么这不只是另一架战斗机?'”
“我和我的团队使用的一个类比是......如果你在下棋,你不想把所有的棋子都放在后排,让国王和王后暴露在前排”克拉克补充道。“当你使用你的无人系统作为前排时,你要出去并且你正在刺激另一方执行某些事情,或者从他们那里得到你想要的行为,那么你可以以某种方式移动棋子以促进这一点。”
卡雷拉项目实验的一部分将涉及探索速跑者和类似设计的更一般的概念。除了被设计成可消耗性之外,目前的预期是尚未进行首飞的无人机将进行空中发射。
克拉克说,一架或多架战斗机或其他类型的战斗机当然可以负责部署这样的无人驾驶飞机,但这会限制他们携带其他武器和储备的能力,以及他所说的其他“遗憾”。洛马公司发布的官方项目视频描绘了一架 F-35 从机翼挂架发射未来的 CMMT,这种使用方式会对喷气式飞机的隐身特性产生负面影响,这将是另一个“遗憾”。
臭鼬工厂的数据表明,专注于更便宜、可扩展的空中发射无人机可能有助于缓解其他运营和后勤压力。诸如速跑者这样的东西本身并不需要跑道或其他重要的基础设施,尽管任何平台都需要它。作为一个整体,美国军方越来越关注已建立的机场和其他基础设施在未来与中国或俄罗斯等近邻对手的潜在高端冲突中的脆弱性,以及随后需要新的替代和分布式基础概念。
为了实现这样的目的,需要一种更新颖的方式来部署速跑者。臭鼬工厂已经在与洛马公司的导弹和火控部门讨论可能利用目前正在为空军开发的速龙系统。当前形式的速龙是一种托盘弹药系统,旨在允许C-17A 或C-130等货机使用AGM-158联合空对地导弹的变体防区外导弹巡航导弹和可能的其他武器。
按照洛马卡雷拉计划,打造基于F-35的未来作战体系,最终是为美国空军的协同作战飞机服务。协同作战飞机是一种无人作战飞机,它将增强F-35、F-22以及即将推出的第六代战斗机,这也是下一代空中优势体系的核心。
值得数字孪生战场实验室读者注意,目前工业4.0研究院正在举办“第四届数字孪生体挑战赛”(Digital Twin Challenge 2022),参赛团队或个人需要深入分析F-35战斗机,对其相关特性及效能进行分析和设计。

工业4.0创新平台 版权所有 All Rights Reserved, Copyright© 2013- 京ICP备14017844号-3

评论