通过数字孪生城市实验室参与团队的努力,目前数字孪生城市开源社区已经完成了基础开发,开始引入无人驾驶等新型功能,以提升数字孪生城市平台作为新一代智慧城市的核心作用和价值。
上周(2021.7.26-2021.7.31)对地图划定形状区域操作进行了完善,开发智能杆的空间查询功能,实现了按圆形、矩形和多边型等形状、沿道路附近查询智能杆的功能。
本周首先将圆形、矩形、多边形的划定区域操作时的形状显示改为动态显示,即形状随鼠标移动而改变,让操作者可以直观的看到划定区域的范围。

划定形状区域查询是用户在地图上用鼠标划出一个区域,圆形、矩形或多边型,系统查询出划定区域内的智能杆。

按道路名称查询想对复杂些,难点在于找出道路的形状坐标,具体到智能杆查询使用前面开发的空间查询即可。为了实现道路的形状坐标的构建,团队引入了OpenStreetMap路网数据。

使用OSM数据,经过一定的计算就可以获得道路形状的几何对象,使用这个对象进行空间查询就可以得到道路附近的智能杆。
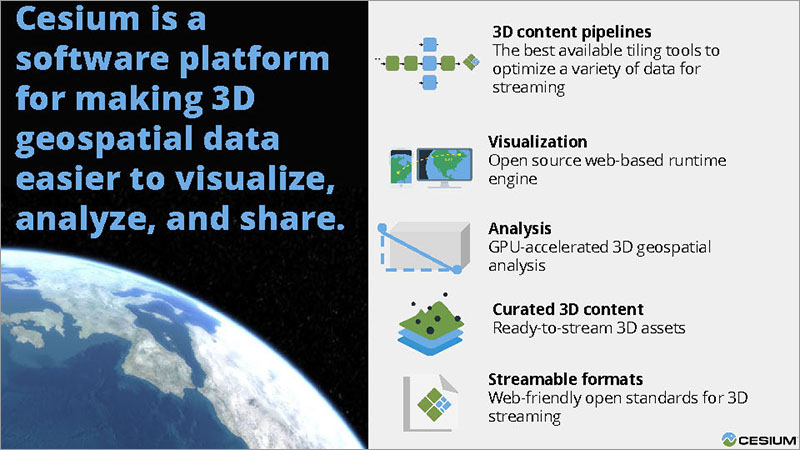
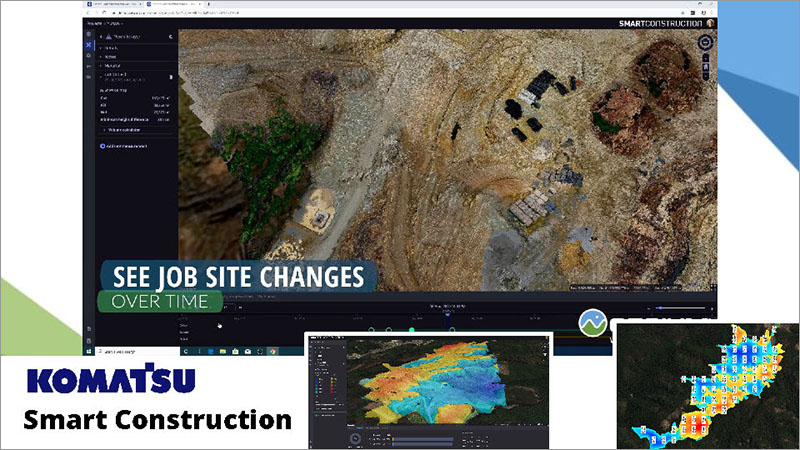
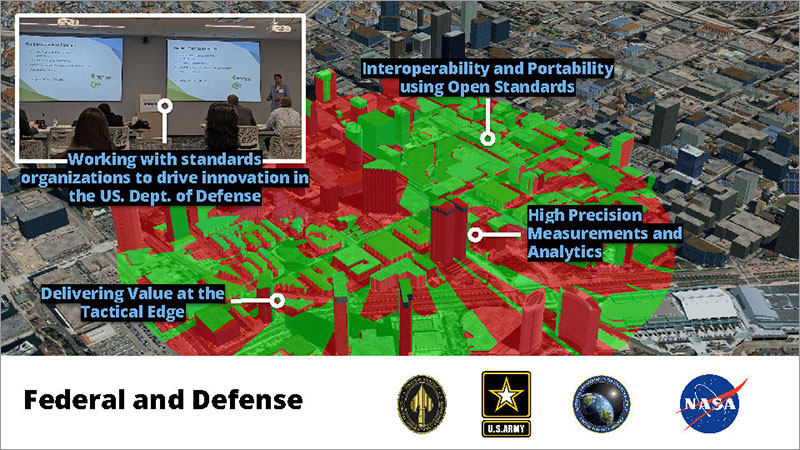
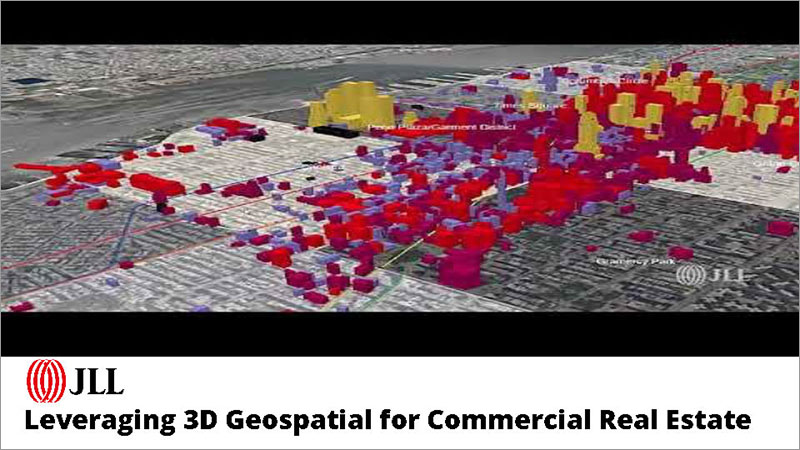
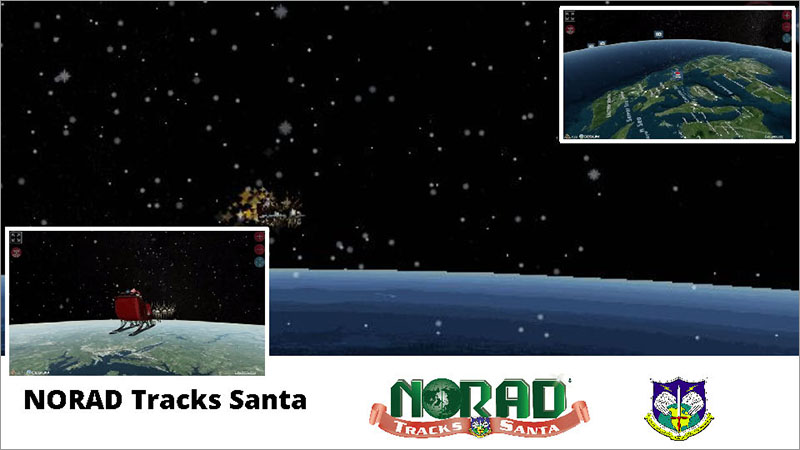
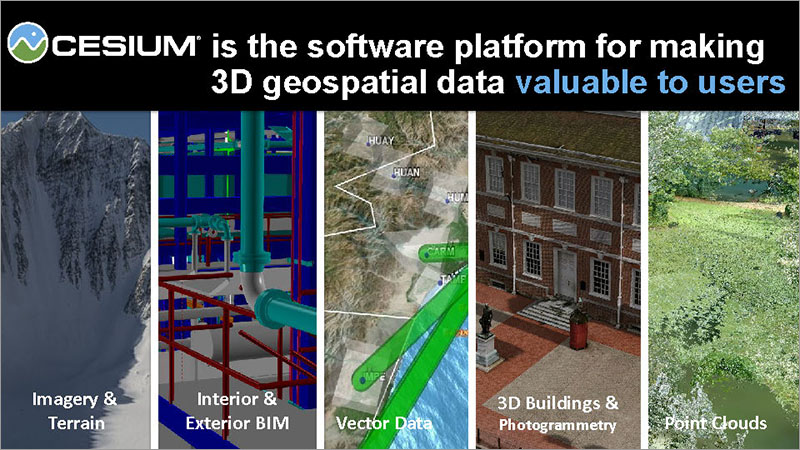
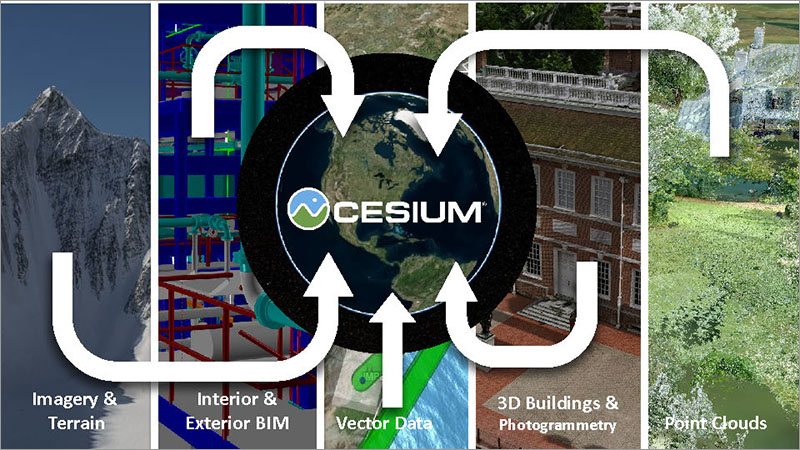
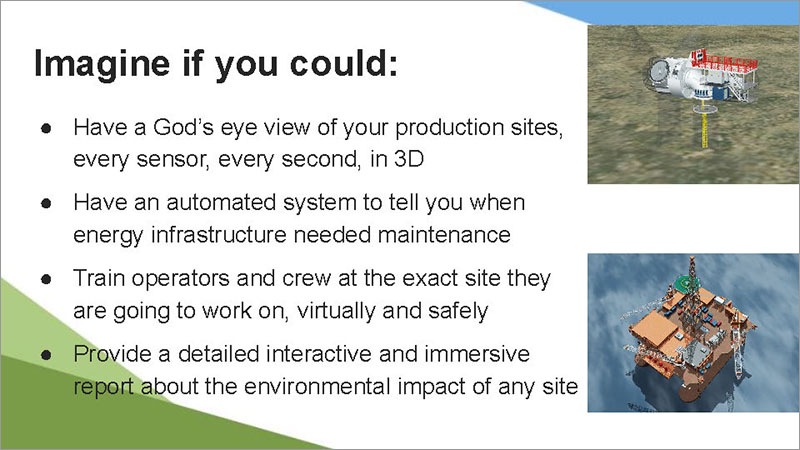
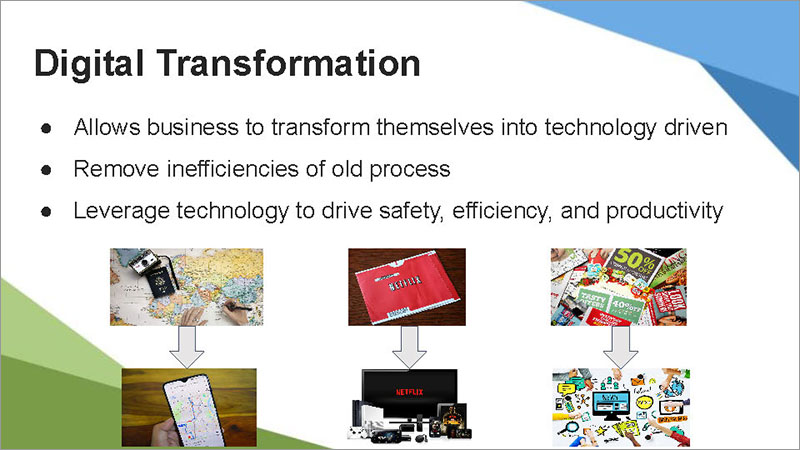
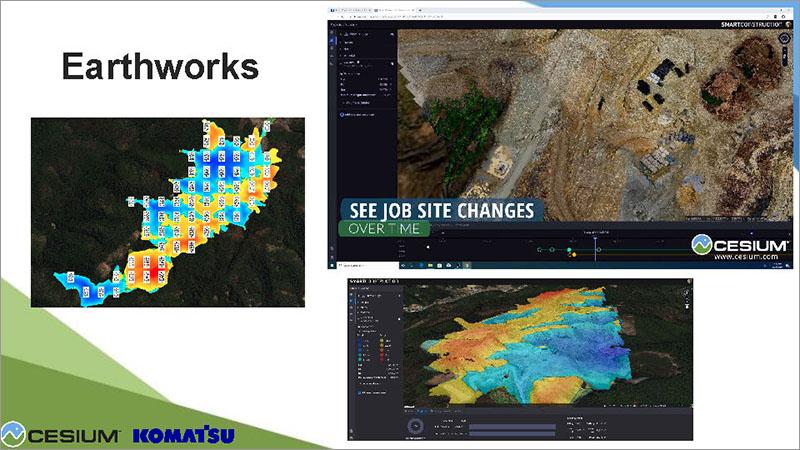
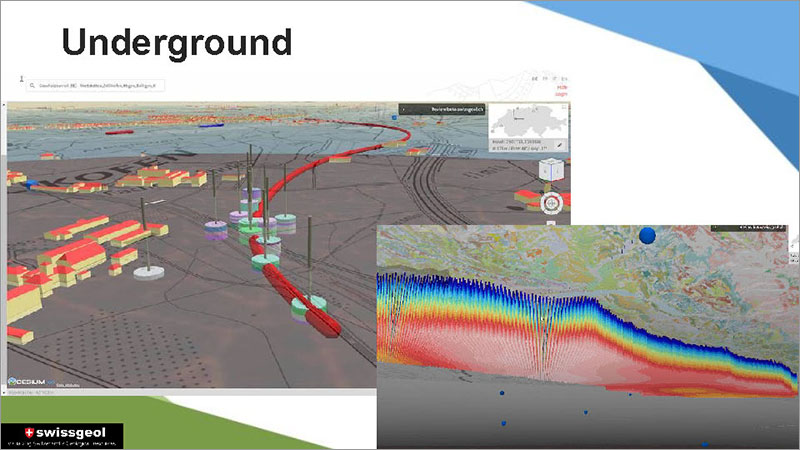
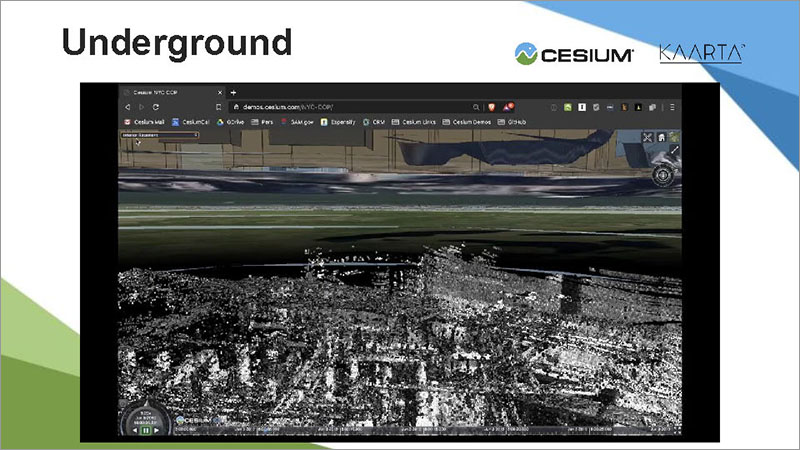
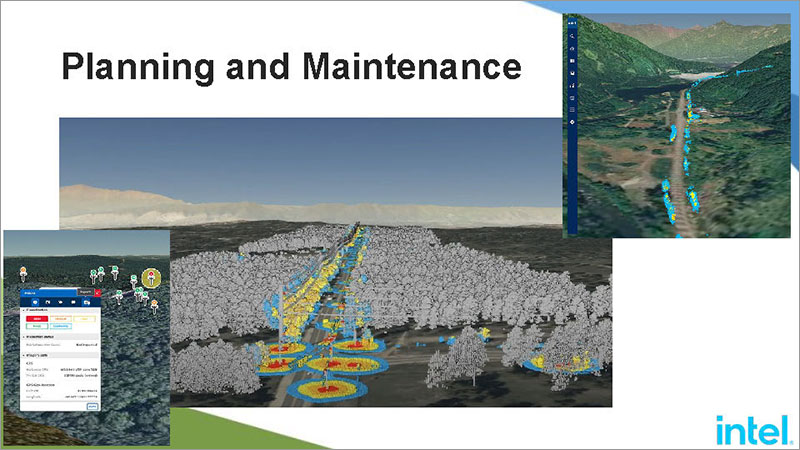
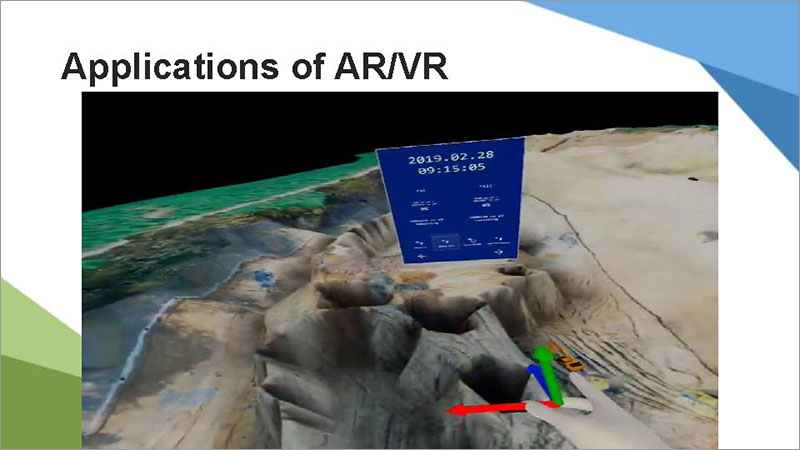
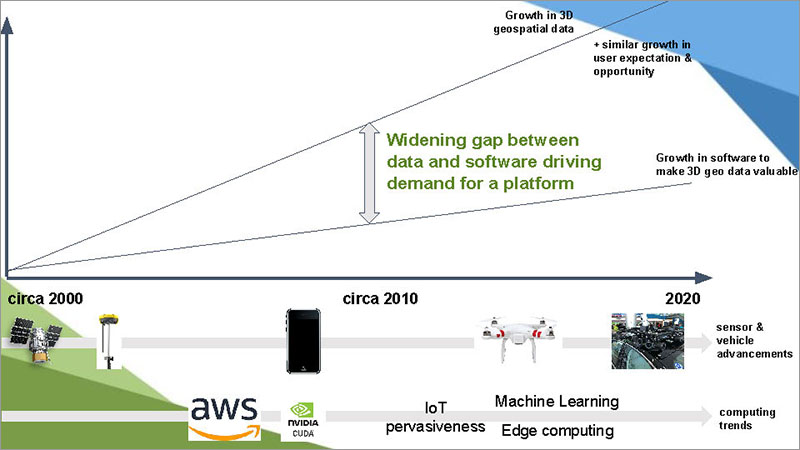
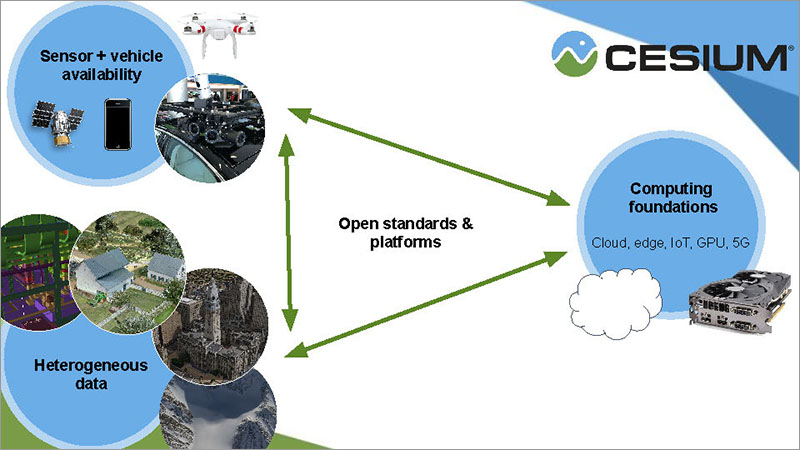
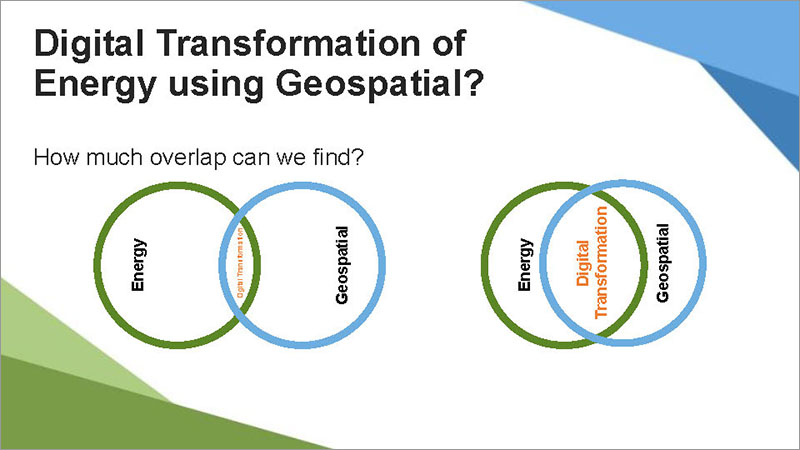
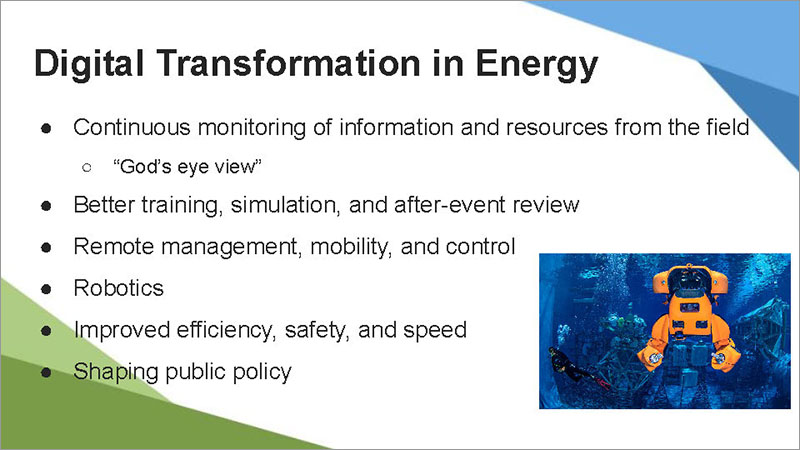
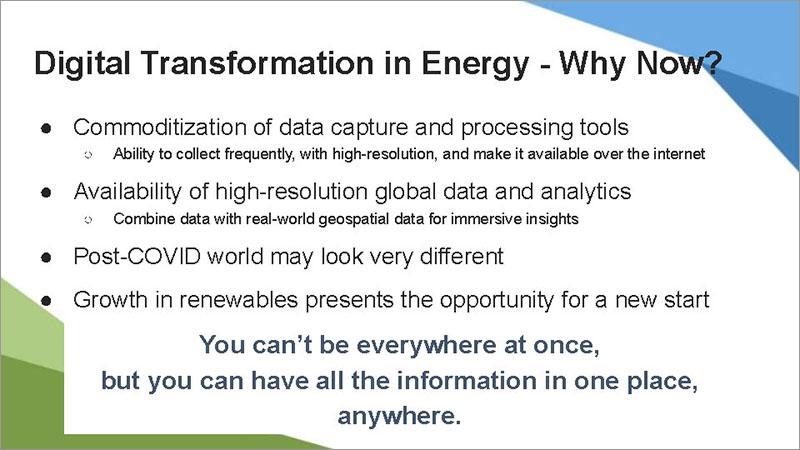
数字化转型是大势所趋,下面分享一份资料,介绍Cesium在数字化转型中的作用。
附录:Powering Digital Transformations For Safer, More Efficient Industry







欢迎开发人员参与数字孪生城市开源社区。
按照数字孪生城市开源社区计划,研发团队将继续围绕数字孪生城市平台开源项目的开发和开源社区的建设展开,目标是设计数字孪生城市场景,开发场景数据化所需的工具。
加入数字孪生城市开源社区说明:
https://openii.cn/digitalcity/community

工业4.0创新平台 版权所有 All Rights Reserved, Copyright© 2013- 京ICP备14017844号-3

评论