以工业4.0研究院胡权院长所著《数字孪生体》一书为指引,数字孪生城市实验室加强“数字孪生基础设施”建设,落实“数字孪生+”战略在城市治理中的应用。目前已经构建了智能杆、无人驾驶和能源系统等多个要素,形成了立体化的数字孪生城市生态。
上周(2021.6.28-2021.7.3)继续进行Cesium 3D Tiles 格式数据文件读写功能的开发,完善i3dm切片模型写入功能,增加模型Batch Table属性信息,实现场景3D Tiles数据发布。
前期开发了i3dm切片模型写入功能,不过模型显示还存在问题,主要是模型太小,且方向是固定的。本周首先进行i3dm切片模型创建过程进行了完善,增加了模型实例的缩放和方向信息。
缩放信息比较简单,每个实例用一个浮点数就可以表示。但模型的方向(右方和上方)法向量需要先计算模型的旋转矩阵,然后从中找出两个方向的法向量,填入i3dm切片模型。
经过试验、调试,我们已经成功的创建了i3dm模型,智能杆的大小和方向都与数字孪生城市项目场景中智能杆的大小和方向一致。

除了要素表中描述智能杆位置、方向、大小的信息外,模型为了携带更多信息,便于Cesium应用,i3dm模型使用Batch Table来记录更多的属性信息。Batch Table数据的一个基本应用是:在场景中点击模型,Cesium可以显示出模型的信息。
完成智能杆3D Tiles数据创建功能后,项目组把相关功能集成到了数字孪生城市项目中,在场景管理列表页面,增加了操作菜单,可以在管理界面直接为场景创建智能杆的3D Tiles数据。
目前项目组对单一类型智能杆数据进行了验证,多个类型智能杆实例还没有验证,这里涉及到场景切片和模型分类组织的问题,欢迎各位开发人员一起探讨。
自动驾驶通常是以数百万公里模拟作为起点的,除了里程外,模拟工作还需要考虑的道路、交通、行人、天气和照明等因素。
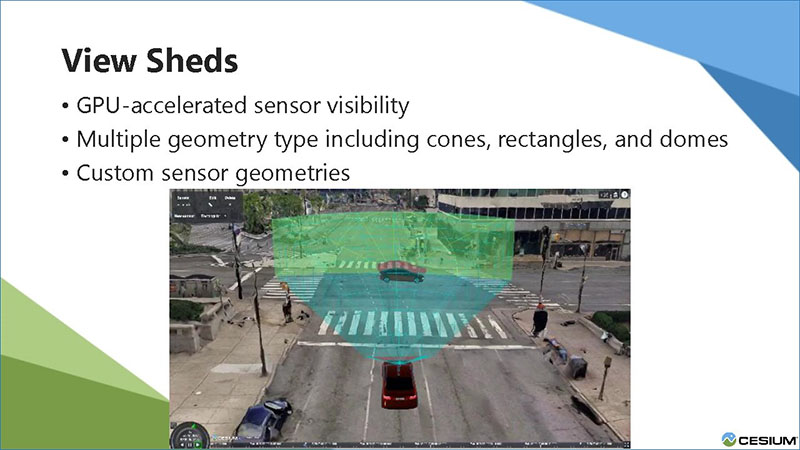
车辆行驶过程中,紧急情况通常发生在复杂的道路网络中,例如交叉路口和隧道,这些路网一般具有复合互连,随时有各种各样的车辆行为以及有限且动态变化的能见度。
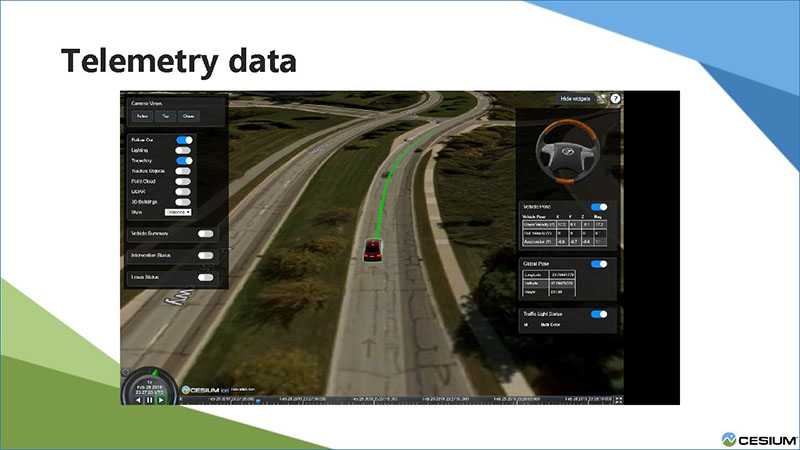
下面提供一份资料,介绍如何将复杂的路网引入Cesium,以进行精确的地理空间数据融合和模拟。



欢迎更多开发人员参与数字孪生城市开源社区。
CesiumSharp项目地址:
https://openii.cn/digitalcity/cesiumsharp
按照数字孪生城市开源社区计划,研发团队将继续围绕数字孪生城市平台开源项目的开发和开源社区的建设展开,目标是设计数字孪生城市场景,开发场景数据化所需的工具。
加入数字孪生城市开源社区说明:
https://openii.cn/digitalcity/community

工业4.0创新平台 版权所有 All Rights Reserved, Copyright© 2013- 京ICP备14017844号-3

评论