以工业4.0研究院胡权院长所著《数字孪生体》一书为指引,数字孪生城市实验室加强“数字孪生基础设施”建设,落实“数字孪生+”战略在城市治理中的应用。目前已经构建了智能杆、无人驾驶和能源系统等多个要素,形成了立体化的数字孪生城市生态。
上周(2021.7.5-2021.7.10)继续进行Cesium 3D Tiles 格式数据文件读写功能的开发,首先进行b3dm切片模型读写功能的开发,初步实现从gltf创建b3dm的功能。
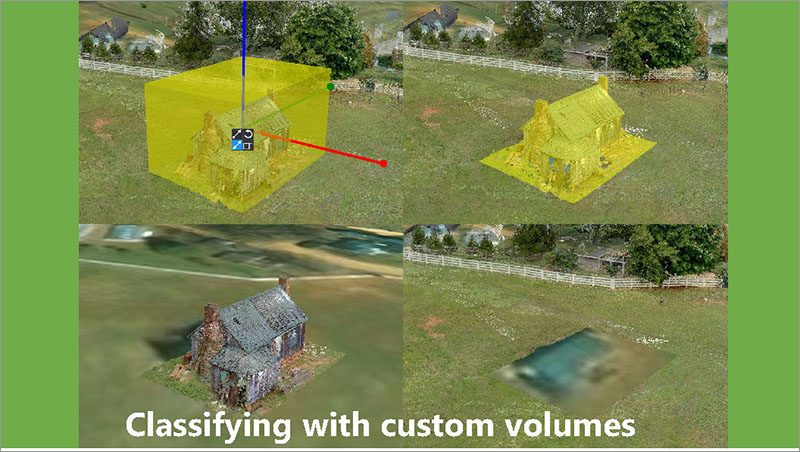
批量3D模型(Batched 3D Model,b3dm)是3D Tiles规范中定义的基础模型之一。批量3D模型切片包含异构模型的渲染数据。术语“批量”是指多个模型的几何数据,即在一个文件中包含多个不同结构的模型,例如,一个场景中的地形或3D建筑,这些模型结构是不同的,但可以放在一个b3dm切片中,这样在进行传输时,可以把一个区域内的三维模型一起发送给应用程序。
批量3D模型中的实际渲染数据存储为二进制 glTF - GL 传输格式的二进制形式。这种格式可以保存个性化的模型,甚至带有纹理和动画的完整 3D 场景,相关数据以压缩方式存储,可以通过网络高效传输并由运行时引擎直接渲染。
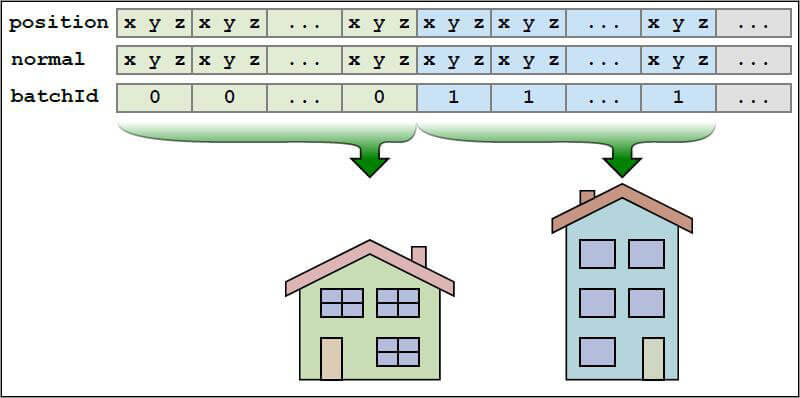 b3dm模型写入功能是开发的难点,原因是需要对gltf模型进行修改,特别是在场景中存在多个模型时,为了让Cesium能够对模型进行区分,需要给每个模型指派一个BatchId。这个处理涉及到了gltf文件操作,需要在gltf文件中区分出物体,从一堆顶点中找出属于同一个物体的顶点,标注BatchId。
b3dm模型写入功能是开发的难点,原因是需要对gltf模型进行修改,特别是在场景中存在多个模型时,为了让Cesium能够对模型进行区分,需要给每个模型指派一个BatchId。这个处理涉及到了gltf文件操作,需要在gltf文件中区分出物体,从一堆顶点中找出属于同一个物体的顶点,标注BatchId。
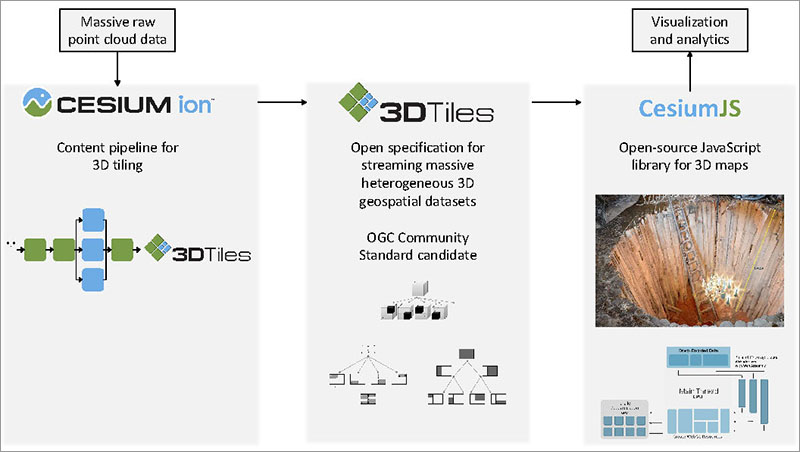
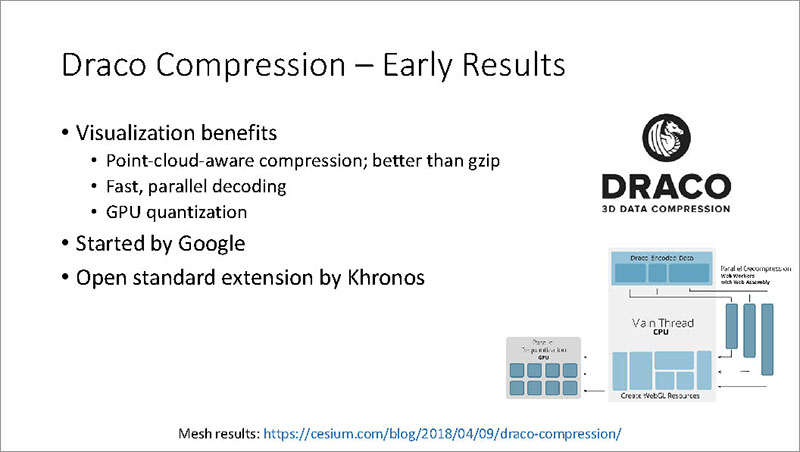
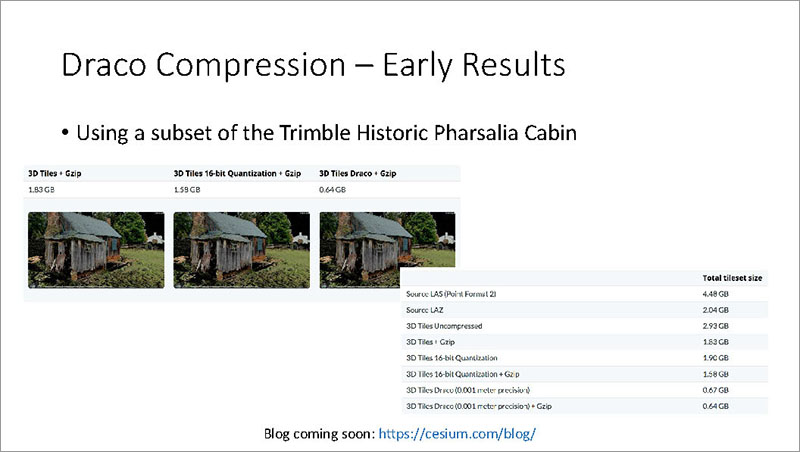
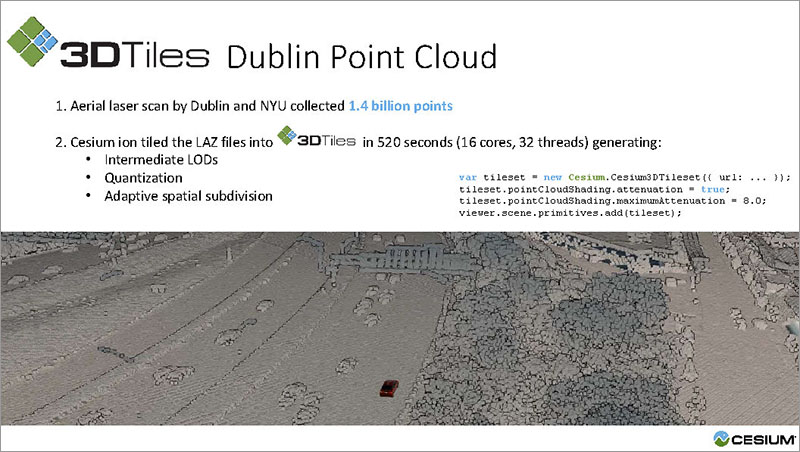
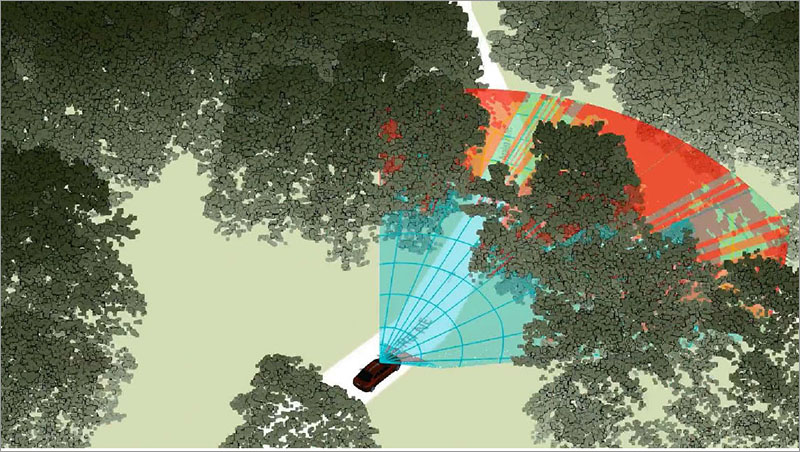
然后,团队启动了点云切片模型读写功能的开发工作。点云格式将大规模点数据组织在一起,进行高效传输以及可视化处理。在点云模型中,每个点由位置和用于定义其外观的属性(颜色、法线等,可选的)构成,还可以增加用于特定场景的元数据。

点云是反向建模的基础,高精度三维点云数据通过算法拟合生成曲面,得到的模型精度高,细节还原度高,同时建模速度也较快。3D Tiles规范对点云数据提供了支持,可应用于众多领域。
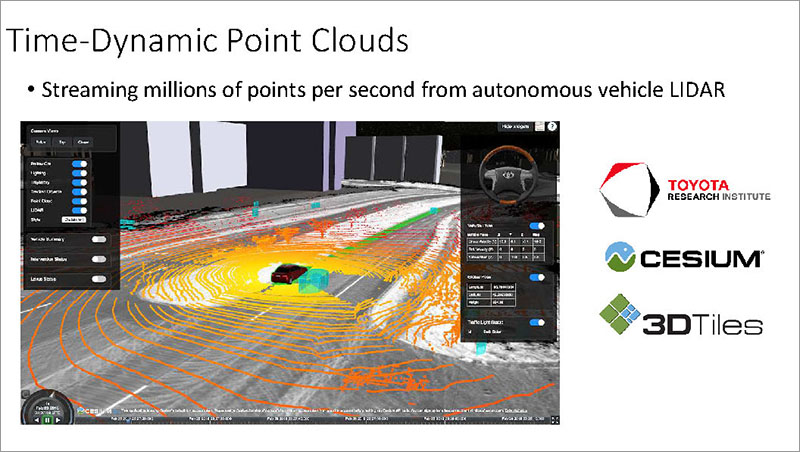
下面分享一份关于点云、自动驾驶的资料。




欢迎更多开发人员参与数字孪生城市开源社区。
CesiumSharp项目地址:
https://openii.cn/digitalcity/cesiumsharp
按照数字孪生城市开源社区计划,研发团队将继续围绕数字孪生城市平台开源项目的开发和开源社区的建设展开,目标是设计数字孪生城市场景,开发场景数据化所需的工具。
加入数字孪生城市开源社区说明:
https://openii.cn/digitalcity/community
揭榜挂帅
本次揭榜挂帅的目标是完善创建b3dm切片模型的方法,要求如下:
1、创建b3dm模型时,能够向已存在的场景增加多个异构模型;
2、每个模型要有自己的BatchId;
3、使用C#语言,基于CesiumSharp项目实现。

工业4.0创新平台 版权所有 All Rights Reserved, Copyright© 2013- 京ICP备14017844号-3

评论