导读:为了更好配合第三届数字孪生体挑战赛(DTC 2021),数字孪生战场实验室准备了100个无人系统案例,计划用100期案例分析发布在数字孪生体挑战赛公众号。本案例为系列之七,介绍了美国海军矢量传感器的创新应用。
传感器在海洋探索中很有价值,同时在海军作战中,对探测敌对方的潜艇至关重要。任何一方如果在探测技术上有技术优势,就有可能在战场上获胜,这是促使DARPA和美国海军持续研究高性能传感器的原因。
DARPA曾经启动了一个创新型项目,即持久性水生生物传感器(PALS,Persistent Aquatic Living Sensors) ,该项目通过环境中现存的生物来感知和监视沿海水域水下活动,包括潜艇、无人水下航行器和潜水员。
美国海军学院也发现“先进传感器+无人系统”的应用潜力,物理学院教授Kevin Smith将小型声学矢量传感器集成到无人潜航器上,以实现方位估计的能力。
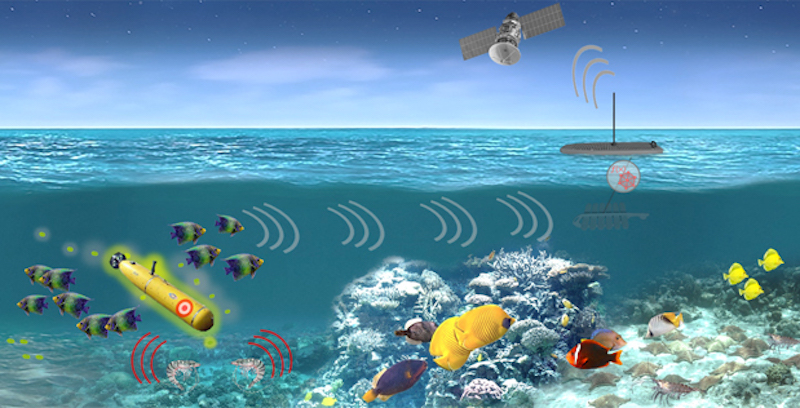
众所周知,声学矢量传感器能够实现方位定位,如果能够配置低功耗的数据采集系统,跟水面舰艇或其他平台进行通信,那么就可以建立一张自动化运行的数据网络,源源不断监测广袤的海洋,这样的思路在军事上有较大的价值。
按照Kevin Smith设计的技术方案,需要解决多个技术难题。
为了实现较大规模的部署,需要开发用于分布式系统的声学矢量传感的轻型、低功耗数据采集系统,否则更换系统的周期太短。
其次,需要确定声学矢量传感器具有的特性,包括表面降噪和通过系绳的充分信号传输,同时还要评估自适应处理字符串的性能,以确定声学矢量传感器对关注目标的监测能力。
另外,还需要评估高数据率射频通信传输片段的性能,把原始声学数据传输到岸基站进行相干/半相干处理,以满足实际应用要求。
如果可以实现声学矢量传感器在无人系统平台的部署,那么将支持以下目标操作:
增强无人系统收集定向的能力,在不影响重量或功率要求的情况下获得声学数据。
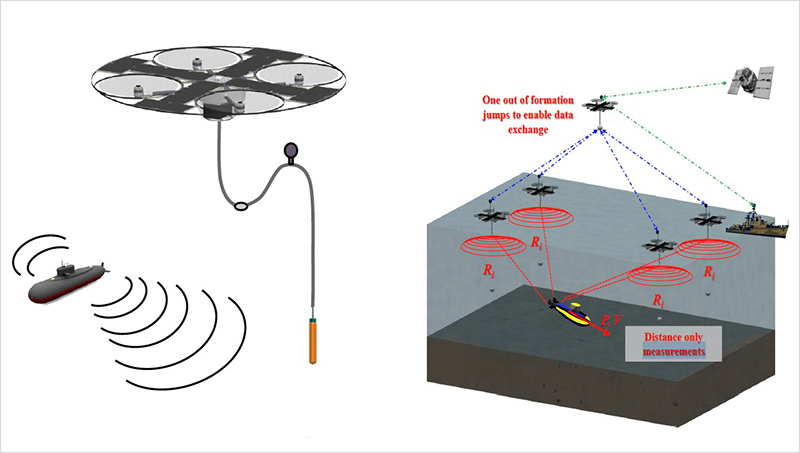
通过多个分布式系统的方位估计,为跟踪关注目标提供一种有效的方法。
在独立的、分布式无人系统之间,建立先进的关联处理能力。
对于未来的海洋战场,如何引入更为先进的传感器,把它们部署到无人系统上去,并建立一个传感器网络,利用机器学习等工具进行数据分析,往往可以得到难以置信的结果,这正是最近几期无人系统案例所揭示的趋势。
作者:吴海军,数字孪生战场实验室研究员
* 系列文章,未完待续。

工业4.0创新平台 版权所有 All Rights Reserved, Copyright© 2013- 京ICP备14017844号-3

评论