导读:为了更好配合第三届数字孪生体挑战赛(DTC 2021),数字孪生战场实验室准备了100个无人系统案例,计划用100期案例分析发布在数字孪生体挑战赛公众号。本案例为系列之八,介绍了网络控制系统的创新应用。
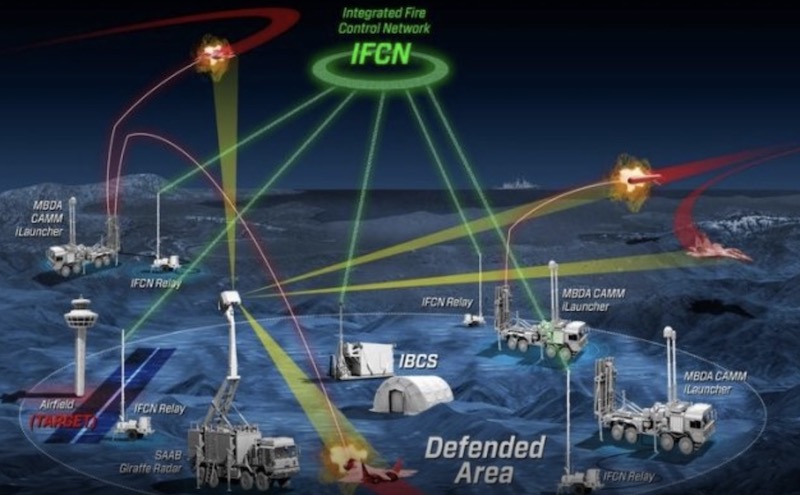
网络控制系统(NCS,Network Control System)是指挥控制中重要应用,引入机器学习将大大改善该系统的运行效率和效果,甚至取得难以想象的作战成效,这是美国海军开展该创新项目的根本原因,它设计了新型的架构体系。
给定有限的具有运动能力的移动系统、通信和传感器,如何支撑军事任务的完成呢?
该项目的解决方式是为网络控制系统开发高级自治能力,通过在操作的所有阶段为最佳NCS配置输入任务相关的信息,包括任务前的计划等。
从方法论来看,使用自适应子模块的机器学习技术,能够开发近乎最优的网络控制系统拓扑,以支持竞争沿海城市环境的实时、混合主动任务目标。
之所以能够实现这样的目标,主要原因如下:
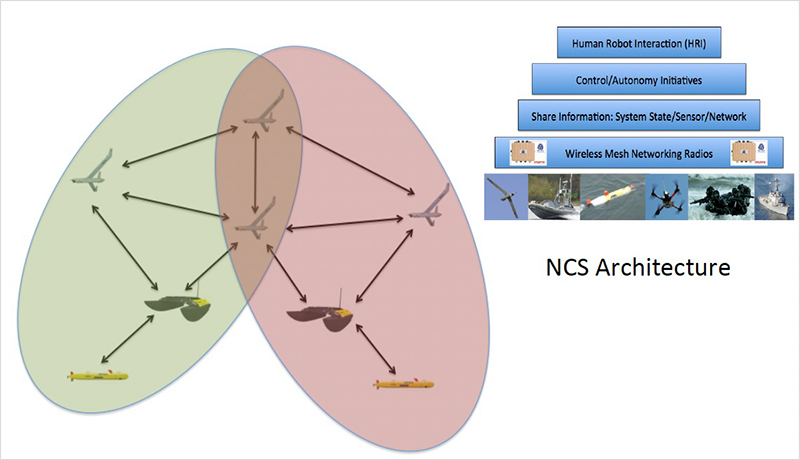
‒ UAV/USV/UUV/USG的组合可用于支持同时执行的任务。
‒ 这是一个动态环境,需要对网络拓扑进行一致评估。
‒ NCS 架构的一个必要组成部分是评估并提出建议以提高性能。
通过加入机器学习能力的网络控制系统,自适应子模块性提供了一个潜在的实时框架,用于确定移动、异构无人(和有人)系统的网络组的适当配置,这是在网络控制系统的创新应用。
由于结合传感器信息、车辆动态和网络状态以及通信限制,这种方法提供了比以前更强大的解决方案。
在具体研发过程中,应确定资产的适当组合和定位,以支持多种混合计划任务场景。同时,还应该开发功能模块,实现近乎实时地评估,将网络控制系统拓扑调整为动态环境,满足提高性能的要求。
作者:吴海军,数字孪生战场实验室研究员
* 系列文章,未完待续。

工业4.0创新平台 版权所有 All Rights Reserved, Copyright© 2013- 京ICP备14017844号-3

评论